18 de Mayo de 2008
Antes que la Estación Espacial Internacional y la Mir orbitaran alrededor de la Tierra, la URSS lanzó nueve estaciones espaciales. Aunque sus objetivos eran oficialmente científicos, tanto sus orígenes como tres de estas naves fueron de carácter militar. A bordo de ellas, oficiales del ejército soviético realizarían prolongadas misiones de espionaje mediante sofisticados equipos de observación. Además de cámaras y radares, estas naves contaban con un dispositivo que permitía enviar el material recopilado a la Tierra y armamento que llegó a ser disparado.
Bajo el nombre en clave Almaz (Алмаз, Diamante), este programa espacial militar sería llevado a cabo en el más estricto secreto. El hermetismo fue tal que la naturaleza del proyecto no sería desvelada hasta los años 90, después de la disolución de la Unión Soviética.

Visión artística de la estación espacial Almaz
Cómo empezó todo
A mediados de los años 60, cuando la Guerra Fría se encontraba en uno de sus momentos más álgidos tras superarse la crisis de los misiles de Cuba, ambas superpotencias aceleraron, aún más si cabe, la carrera armamentística para lograr una posición dominante sobre el adversario.

En la Unión Soviética, Nikita Jrushchov (Никита Хрущёв) recibiría todo tipo de proyectos por parte de los principales constructores: bombarderos de largo alcance, submarinos, misiles… Entre todas las propuestas destacaría la formulada por Vladímir Cheloméi (Владимир Челомей), pionero en la construcción de misiles e ingeniero más joven en ser nombrado constructor, quien, en lugar de proponer el desarrollo de formas de armamento ya conocidas, ofreció algo digno de ciencia ficción: combatir el enemigo desde el espacio, mediante el uso de estaciones orbitales capaces de controlar permanentemente cualquier objetivo estratégico.
En una época en que los satélites artificiales eran aún muy rudimentarios, la combinación de potentes equipos de observación con los conocimientos de experimentados oficiales parecía la solución ideal para realizar un seguimiento constante del enemigo y obtener así una rápida y precisa capacidad de respuesta.
El Proyecto Almaz
El fantástico proyecto presentado por Cheloméi en 1964 sigue impresionando hoy en día por su grandiosidad: estaciones espaciales tripuladas de veinte toneladas orbitarían durante un período de hasta tres años alrededor de la Tierra, proporcionando información detallada de los efectivos enemigos en tierra, mar y aire; desde bases de misiles a aviones, pasando por submarinos o cualquier otro tipo de unidad. En la siguiente imagen podemos ver una de las estaciones Almaz que se conservan (las sillas que aparecen debajo ayudan a hacerse una idea de sus dimensiones):

Almaz-T, versión automatizada desarrollada en los años 80
Para lograr que las estaciones Almaz funcionaran de forma ininterrumpida, naves de transporte se encargarían de llevar suministros y cosmonautas de reemplazo periódicamente (cada 90 días). Estas naves de transporte incluirían una cápsula de retorno para que las tripulaciones relevadas pudiesen regresar a la Tierra. Algo especialmente innovador era que las cápsulas de retorno serían reutilizables hasta diez veces (una de ellas viajó al espacio y regresó con éxito en tres ocasiones).
A continuación se muestra un esquema del sistema Almaz al completo, tal como fue concebido inicialmente. De izquierda a derecha se puede observar la nave de transporte -compuesta por la cápsula de retorno y un módulo de carga- y la estación orbital. Ampliando la imagen se pueden apreciar algunos detalles como la disposición del equipamiento o las figuras de tres cosmonautas:
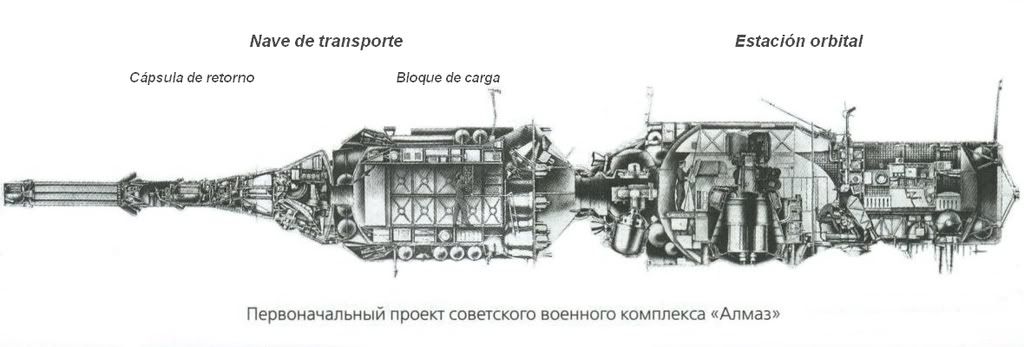
Proyecto inicial del complejo militar soviético Almaz
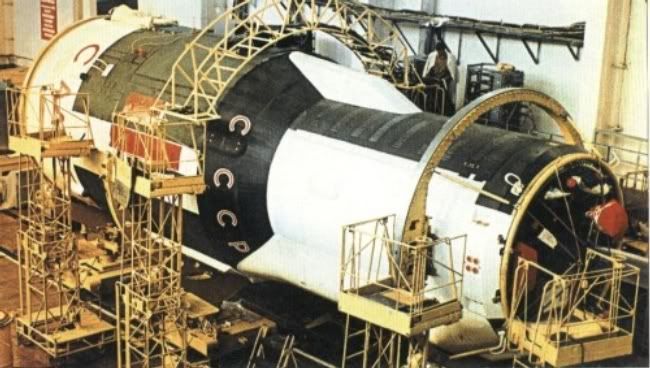
Siguiendo la misma disposición del esquema anterior, en la siguiente fotografía podemos ver el complejo Almaz al completo:
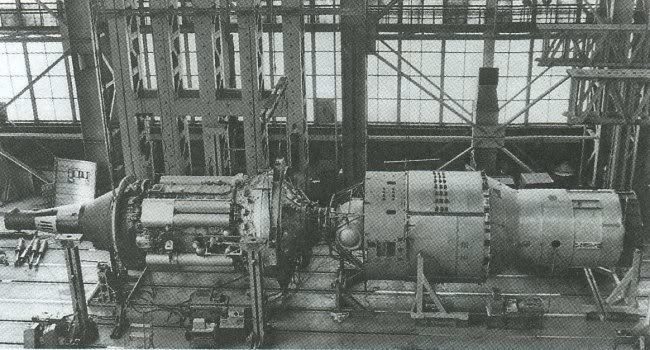
Prueba de acoplamiento entre nave de transporte y estación orbital
En la siguiente fotografía se muestra una de las cápsulas de retorno conservadas. Entre otros detalles, se pueden apreciar los retro-propulsores situados debajo de la cubierta blanca del extremo superior, utilizados para desacelerar la cápsula en la reentrada, y, a través de la escotilla, los respaldos de dos de los asientos que ocuparían los cosmonautas:
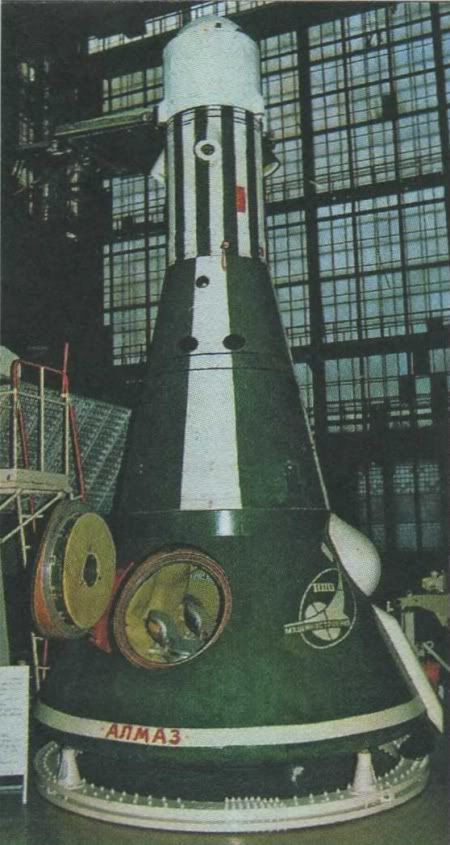
Cápsula de retorno Almaz
A pesar de las limitaciones a las que se enfrentaban los ingenieros soviéticos (20 toneladas era la carga máxima que se podía poner en órbita y 4,1 metros era el diámetro máximo que se podía transportar en tren hasta Baikonur), conseguirían equipar la estación con todo lo imaginable. Entre los instrumentos de observación caben destacar catorce cámaras fabricadas especialmente para las estaciones Almaz (una de ellas gigante, con un objetivo de casi 2 metros). Algunas de estas cámaras serían dotadas con un ingenioso sistema de espejos que permitía tomar fotografías nítidas a pesar de una velocidad orbital de casi 8 km/s.
A continuación podemos ver dos imágenes de los paneles de mandos de la estación Almaz. Mientras que en la primera destacan dos visores y una pantalla circular, en la segunda se aprecia el curioso sistema de navegación utilizado entonces, basado en un pequeño globo terráqueo:


Una vez obtenidas las imágenes deseadas, estas eran enviadas a la Tierra en el que podría ser considerado el primer paquete postal espacial. El material era depositado en una cápsula de 360 kg. de peso y 85 cm. de diámetro que posteriormente era eyectada de la estación para que descendiera a la Tierra tras reentrar en la atmósfera:

Proceso de descenso de la cápsula
Para que las estaciones orbitales Almaz fueran auténticas fortalezas inexpugnables, serían equipadas con armamento que podría ser utilizados tanto defensiva como ofensivamente para derribar satélites u otras naves espaciales. Concretamente, contarían con un cañón ametrallador Nudelmann, similar a los utilizados en aviación, y pequeños misiles espacio-espacio. Como si de un caza se tratara, para poder disparar su cañón las estaciones Almaz debían encararse hacia el objetivo y, para evitar ver alterada su órbita, encender propulsores que compensaran el retroceso provocado por los disparos.
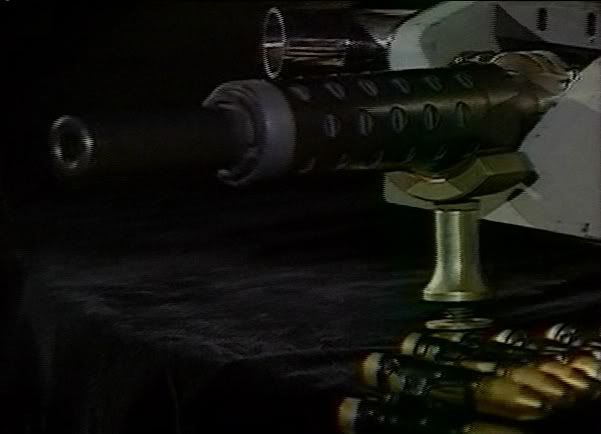
Primer plano del cañón Nudelmann
Después de ver las principales características del complejo militar Almaz, os invito a mirar el siguiente vídeo que, en un minuto y medio, ofrece una visión general de todo el equipamiento. Una curiosidad a destacar es el periscopio situado en la parte superior de la estación, que permitía observar qué ocurría 360º alrededor de la nave y habría sido clave en caso de tener que entrar en combate (aparece en 00:17 aprox.). En contra de lo que afirman en este vídeo, este canal televisivo no ha tenido acceso en exclusiva a las instalaciones, ya que es posible visitarlas. Si alguien está interesado, puedo indicarle un par de documentales rusos muy completos.
Evolución del Proyecto Almaz
Krushchov quedó inmediatamente maravillado por el proyecto de Cheloméi, quien el propio Stalin ya había calificado de visionario en sus inicios como constructor de motores a reacción y cohetes. La muestra más clara de la fascinación que despertaba Cheloméi en Krushchov la encontramos en el hecho que su propio hijo entró a trabajar en el equipo de ingenieros del constructor.
El Proyecto Almaz recibiría luz verde pocas semanas antes de que Krushchov fuera apartado del cargo; no sólo gracias al apoyo del aún Secretario General del PCUS, sino también por el reto que meses antes había lanzado el presidente americano Lyndon Johnson, al anunciar que los Estados Unidos trabajaban en un Laboratorio Orbital Tripulado (Manned Orbital Laboratory, MOL) para que la Fuerza Aérea de los Estados Unidos explorara posibilidades militares en el espacio.

Visión artística del Manned Orbital Laboratory
Pero no todo serían facilidades para Cheloméi. Después que Krushchov abandonara el poder, Brézhnev (Брежнев) nombró como secretario del Comité Central del PCUS encargado de asuntos militares el que sería la cruz personal de Cheloméi: Dmitri Ustinov (Дмитрий Устинов), responsable a partir de entonces de supervisar el desarrollo del Proyecto Almaz.
La primera gran tensión entre ambos llegaría cuando Ustinov ordenó que la primera estación Almaz debía ser lanzada en Abril de 1970, para conmemorar el centenario del nacimiento de Lenin. Consciente de que semejante plazo no era factible, Cheloméi pidió reiteradamente que esa fecha fuera aplazada; especialmente tras el accidente que justo tres años antes costaría la vida a Vladímir Komarov (Владимир Комаров), quien falleció a bordo de la Soyuz 1 por problemas técnicos, presuntamente provocados por el apresurado lanzamiento con motivo de otra fecha señalada: el 1 de Mayo.
En Diciembre de 1969, cuando la URSS se sentía derrotada por la llegada a la Luna de los Estados Unidos y se veía claro que Cheloméi no cumpliría el plazo fijado para lanzar la primera estación orbital, Ustinov dio la estocada más grave que recibiría el Proyecto Almaz: decretó que el equipo de Cheloméi debía ceder su proyecto al equipo del ya fallecido Sergéi Koroliov (Сергей Королёв), liderado entonces por Vasily Mishin (Василий Мишин), para que fuera éste el encargado de lanzar la primera estación espacial tripulada, nuevo reto en la carrera espacial entre ambas superpotencias. Así nació el que sería conocido como Programa Salyut (Салют, Salva), que tenía como misión llevar a cabo investigaciones científicas relacionadas con la vida en el espacio.
En Abril de 1971, un año más tarde de la fecha exigida por Ustinov, llegó el tan ansiado momento: la primera estación espacial tripulada orbitó alrededor de la Tierra, después que la nave Soyuz 11 se acoplara con la estación Salyut 1 y su tripulación habitara en ella durante 23 días. Con esta hazaña la URSS lograba una nueva victoria sobre el programa espacial estadounidense, que no pondría en órbita su primera y única estación espacial (Skylab) hasta 1973. Desgraciadamente, los cosmonautas de la Soyuz 11 murieron en la reentrada, cuando su cápsula se despresurizó.

Tripulación de la nave Soyuz 11: Dobrovolsky, Patsayev y Volkov
En contra de lo que cabría pensar, el Programa Salyut no supuso el final del Proyecto Almaz. El Comité Central del PCUS veía en las estaciones militares propuestas por Cheloméi un gran paso en la carrera de armamentos, al permitirle una excelente forma de controlar el enemigo, guiar los misiles intercontinentales con precisión y hacerse con el control militar del espacio. En consecuencia, la planta de Chiloméi recibió plena financiación para que, utilizando el Programa Salyut como tapadera, lanzara varias estaciones Almaz con fines exclusivamente militares.
Mientras los ingenieros trabajaban en el desarrollo de las estaciones, Chiiloméi lideró personalmente el proceso de selección y entrenamiento de los cosmonautas que las tripularían. Destacados oficiales de todas los ejércitos y especialidades serían reclutados. Con ello se buscaba disponer de cosmonautas especializados en los distintos tipos de objetivos sobre los cuales se podían llevar a cabo misiones de espionaje.

Oficiales seleccionados para el Proyecto Almaz
Entre las nueve estaciones espaciales lanzadas bajo el paraguas del Programa Salyut, tres serían estaciones militares Almaz: Salyut 2, Salyut 3 y Salyut 5. La primera de ellas, lanzada en Abril de1973, acabó en fracaso, después que no lograra alcanzar la órbita prevista y los cosmonautas que tenían previsto ocuparla tuvieran que quedarse en Tierra, viendo finalmente como la estación era destruida al reentrar en la atmósfera terrestre.
El 25 de Junio de 1974, la segunda estación espacial Almaz fue lanzada con éxito bajo el nombre de Salyut 3. A bordo se encontraban las cámaras de gran precisión mencionadas anteriormente. Gracias a la cámara gigante Agat, los cosmonautas podían llegar a distinguir qué aviones se encontraban en la cubierta de un portaaviones. Durante el tiempo que estuvo en órbita no sólo se probaron las cámaras, sino todo tipo de dispositivos de reconocimiento. Las imágenes obtenidas fueron enviadas con éxito dentro de la ‘cápsula de correo’. Esta estación también fue equipada con el armamento mencionado anteriormente y, antes de ser desorbitada en Enero de 1975, el cañón ametrallador fue disparado con éxito (estando la estación en modo automático) contra un satélite señuelo puesto en órbita especialmente para la ocasión. Aunque dos operaciones de acoplamiento fracasaron, el resultado final fue considerado un gran éxito. En la siguiente fotografía podemos ver cómo esta segunda estación Almaz fue inspeccionada antes de su lanzamiento. Evidentemente nada daba a entender que se trataba de una estación militar Almaz, puesto que en el exterior se rotuló la palabra Salyut como en las demás naves.
Estación espacial Salyut 3, segunda estación militar Almaz
En Junio de 1976 fue lanzada la que sería la última estación Almaz tripulada, la Salyut 5. Aunque esta misión también fue un éxito, las mejoras tecnológicas que se habían ido desarrollando en materia de observación hicieron que ya no valiera la pena seguir enviando cosmonautas, ya que las mismas funciones podían ser desarrollados por satélites automáticos. Desde entonces, las únicas estaciones orbitales tripuladas serían destinadas a fines científicos.












